1. Kruskal 方法
代表邊的個數
- 選擇最小權重的邊 (可排可不排,不排就要靠遍歷找最小值) 。
- 如果不會形成環, 就選擇, 並加入生成樹當中。
- 直到有 個邊(一共 個點, 沒有環),否則執行第二步。 難點在於判斷有沒有形成環。 因此建立 MST 需要有兩個功能, 來幫助上面的演算法
- 找到最小的權重:可以事先排序, 或是直接找, 。
- 檢查環:用並查集判斷節點是否已經相連。
|
以右圖為例,最初一共有八條邊,權重:
|
|
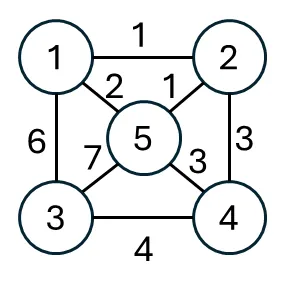
- 取得權重最小的邊 1,連接節點 2, 5。
- 並查集:
- 待選擇的邊:
- 取得權重最小的邊 2,發現 1, 5 已經在相同集合,會形成環,代表這個邊不會連到新的節點,不選這個邊。
- 並查集:
- 待選擇的邊:
- 取得權重最小的邊 3,連接節點 2, 4(依照排序的結果,也有可能是 5, 4 那條)。
- 並查集:
- 待選擇的邊:
- 取得權重最小的邊 3,發現 4, 5 已經在相同集合,不選這個邊。
- 並查集:
- 待選擇的邊:
- 取得權重最小的邊 4,連接節點 3, 4。
- 並查集:
- 待選擇的邊: 已經找到 條邊,結束,總權重是 。
程式碼
#include <iostream>
#include <numeric>
#include <algorithm>
using namespace std;
const int MAXN = 5005;
const int MAXM = 2e5+5;
struct Edge {
int u, v, w;
bool operator<(const Edge& other) {
return this->w < other.w;
}
};
int parent[MAXN];
Edge edges[MAXM];
int find(int x) {
if(parent[x] != x) {
parent[x] = find(parent[x]);
}
return parent[x];
}
int main(void) {
ios::sync_with_stdio(false);
cin.tie(nullptr);
int n, m;
cin >> n >> m;
iota(parent, parent + n + 1, 0); // 節點編號 1 ~ n
for(int i = 0; i < m; i++) {
cin >> edges[i].u >> edges[i].v >> edges[i].w;
}
sort(edges, edges + m); // 根據權重排序,小到大
int res = 0, cnt = 0;
for(int i = 0; i < m; i++) {
int rootU = find(edges[i].u);
int rootV = find(edges[i].v);
if(rootU != rootV) { // 只有在集合不同時,才去合併
parent[rootU] = rootV;
res += edges[i].w;
if(++cnt == n - 1) { // 已經湊到 n - 1 條邊,已經找到最小生成樹
cout << res;
return 0;
}
}
}
cout << "orz"; // 無法找到最小生成樹
}2. Prim 方法
從一個點開始,慢慢地往外生長
- 建兩個集合, 代表被生成樹碰到的頂點, 表示沒被碰到的。
- 每次從 選擇一個頂點 ,從 選擇一個頂點 ,且這兩點是所有可選擇的配對方案中,權重最小的一對點。
- 加入頂點 , 移除頂點 ,也就是把頂點 移動到 中。
- 重複直到 為空。
程式碼
#include <iostream>
#include <queue>
using namespace std;
#define pii pair<int,int>
const int MAXN = 5001;
const int MAXM = 4e5+1; // 雙向邊最多的數量
// 鏈式前向星
int head[MAXN];
int Next[MAXM];
int to[MAXM];
int weight[MAXM];
int id = 1;
// 判斷哪些邊已經觸碰到
bool used[MAXN];
void build(int n) {
fill(head, head + n + 1, 0);
id = 1;
fill(used, used + n + 1, false);
}
void addEdge(int u, int v, int w) {
Next[id] = head[u];
to[id] = v;
weight[id] = w;
head[u] = id++;
}
int main(void) {
ios::sync_with_stdio(false);
cin.tie(nullptr);
int n, m, x, y, z;
cin >> n >> m;
build(n);
for(int i = 0; i < m; i++) {
cin >> x >> y >> z;
addEdge(x, y, z);
addEdge(y, x, z);
}
priority_queue<pii, vector<pii>, greater<pii>> pq; // 存放權重, 鄰居
for(int ei = head[1]; ei > 0; ei = Next[ei]) {
pq.push({weight[ei], to[ei]});
}
used[1] = true;
int cnt = 1; // 當前觸碰到的點數量
int cost = 0;
while(!pq.empty()) {
pii cur = pq.top(); pq.pop();
if(!used[cur.second]) {// 沒有觸碰過這個節點
used[cur.second] = true;
cnt++;
cost += cur.first;
for(int ei = head[cur.second]; ei > 0; ei = Next[ei]) { // 加入新的邊
pq.push({weight[ei], to[ei]});
}
if(cnt == n) {
break;
}
}
}
if(cnt != n) {
cout << "orz";
}
else {
cout << cost;
}
}3. Prim 方法的優化
Prim 的複雜度跟 Kruskal 是一樣的,大多時間都用 Kruskal 就夠了。
不過 Prim 方法可以優化複雜度,原先是
可以改為 。
前面的作法,是在堆中選出權重最小的邊,將連到的點加入。
複雜度取決於邊的數量,而改進的算法則取決於點的數量,在點少邊多的情況下,優化過後的算法能表現得更好。
而現在只能跟圖上的節點數量有關,希望能讓每個節點都只會進出堆中一次。
對於一個點來說,它只會有三種情況:
- 從未進入過堆中,代表沒有被算過,將新的邊加入堆中。
- 正在堆當中,代表正在更新中,如果新來的邊比較小,更新堆中元素。
- 已經進入堆,且不在堆當中,代表更新完畢,後續相關的邊就直接忽略。
這時,我們假設節點 有來到鄰居 的兩條路徑,分屬不同的情況。
- 其中 屬於情況三,已經進入堆,且不在堆當中。已經被更新完畢,那麼這條 的路徑,就不需要考慮在內。
- 而 屬於情況二,正在堆中,代表更新中。這條 的路徑應該要被考慮在內。
於是我們更新堆中的資料,若此時堆中的資料是 ,
代表來到 節點的路徑當前是 100,
那麼,就可以用這條新的路徑取代,
也就是將堆中的資料,從 更改為 。
但是,堆在調整時,對應的元素會調整位置,
如果想要做到上述的修改。我們就得時時知道 位於堆的哪個位置。
在情況二當中,我們需要知道堆中元素的位置,因此需要建立一個反向索引表where用來記錄。
- 最初隨便選一個節點,將相關的邊加入到堆中。
- 彈出最小堆中的節點,紀錄答案,並將相關的邊,用於更新堆中元素。
- 判斷前述的三種情況。
- 重複步驟二,直到最小堆為空。
程式碼
#include <iostream>
using namespace std;
const int MAXN = 5002;
const int MAXM = 4e5+2;
// 題目輸入
int n, m, x, y, z;
// 鏈式前向星
int head[MAXN];
int Next[MAXM];
int to[MAXM];
int weight[MAXM];
int id = 1;
// 小根堆
int heap[MAXN][2]; // 每個節點的紀錄最多進入一次,出去一次。
int where[MAXN]; // 紀錄節點在 heap 的位置。-2代表已經出去過,-1代表新節點
int heapSize; // 當前堆的大小
void build() {
// 鏈式前向星初始化
fill(head, head + n + 1, 0);
id = 1;
// 堆相關的反向索引表初始化
fill(where, where + n + 1, -1);
heapSize = 0;
}
// 鏈式前向星的相關函數
void addEdge(int u, int v, int w) {
to[id] = v;
weight[id] = w;
Next[id] = head[u];
head[u] = id++;
}
// 堆調整相關函數
void heapSwap(int i, int j) {
swap(where[heap[i][0]], where[heap[j][0]]);
swap(heap[i], heap[j]);
}
bool isEmpty() {
return heapSize == 0;
}
// 向上調整
void heapInsert(int i) {
while(heap[i][1] < heap[(i - 1) / 2][1]) {
heapSwap(i, (i - 1) / 2);
i = (i - 1) / 2;
}
}
// 向下調整
void heapify(int i) {
int l = i * 2 + 1;
while(l < heapSize) {
int best = l + 1 < heapSize && heap[l + 1][1] < heap[l][1] ? l + 1 : l;
// 如果當前節點已經比最小的孩子還小(或相等),說明調整完畢
if(heap[i][1] <= heap[best][1]) {
break;
}
heapSwap(i, best);
i = best;
l = i * 2 + 1;
}
}
// 丟掉最小節點
void pop() {
int v = heap[0][0]; // 存頂端節點
heapSwap(0, --heapSize); // 拿尾端補頂端
heapify(0);
where[v] = -2; // 標記為已經出過 heap
}
// 當前處理的是編號為 ei 的邊
void addOrUpdateOrIgnore(int ei) {
int v = to[ei];
int w = weight[ei];
if(where[v] == -1) { // 沒有進入過,就進入
heap[heapSize][0] = v;
heap[heapSize][1] = w;
where[v] = heapSize++;
heapInsert(where[v]); // 調整這個位置的數值
}
else if(where[v] >= 0) { // 位於堆中
if(heap[where[v]][1] > w) { // 更新數值
heap[where[v]][1] = w;
heapInsert(where[v]); // 向上調整
}
}
}
int main(void) {
ios::sync_with_stdio(false);
cin.tie(nullptr);
cin >> n >> m;
build();
for(int i = 0; i < m; i++) {
cin >> x >> y >> z;
addEdge(x, y, z);
addEdge(y, x, z);
}
int nodeCnt = 1; // 當前觸碰到的點數量
int cost = 0;
where[1] = -2; // 節點 1 視為已經彈出,如果在下方迴圈之後設,遇到自環,where 的判斷會有問題
for(int ei = head[1]; ei > 0; ei = Next[ei]) { // 將第一個點能接觸到的鄰居放入 heap, 作為初始狀態
addOrUpdateOrIgnore(ei);
}
while(!isEmpty()) {
int v = heap[0][0];
int w = heap[0][1];
pop();
cost += w;
nodeCnt++;
for(int ei = head[v]; ei > 0; ei = Next[ei]) {
addOrUpdateOrIgnore(ei);
}
}
if(nodeCnt != n) {
cout << "orz";
}
else {
cout << cost;
}
}複雜度分析
- 時間複雜度:Kruskal,Prim ,Prim 優化
- 空間複雜度: